Motor Driver ICs
Controlling a motor
Vorkenntnisse
Ziel:
- Motorsteuerungen nutzen
Neben den beiden zuvor vorgestellten Lösungen gibt es auf dem Markt auch eine Reihe von fertigen ICs für die Motoransteuerung.
Bekannte Motortreiber sind z.B der L298N, L293D, DRV8833, TB6612FNG, ...
LN293D vs DRV8833
Strom und Spannung:
L293D: Bis 36V, max 600mA pro Kanal (kurzfristig: 1.2 A)DRV8833: 2.7V - 10.8V, max 1.5A pro Kanal (kurzfristig: 2A)
Wirkungsgrad:
LN293D: Bipolartransistoren (hohe Wärmeentwicklung, Spannungsverlust ~1.5V)DRV8833: MOSFET-Technologie (weniger Hitzeentwicklung, niedriger Spannungsabfall)
Fazit: Der DRV8833 ist erheblich effizienter und bleibt kühler.
Preis:
L293D: Tendenziell günstiger, aber mit dem Nachteil der geringeren EffizienzDRV8833: Etwas teurer, aber modernes Design und bessere Leistung
Solution
Solution
L293D: Wenn du höhere Spannungen (z. B. 24 V) brauchst und Effizienz nicht so wichtig ist.DRV8833: Für batteriebetriebene Anwendungen, kleine Motoren (bis 10 V) besser geeignet.
L293D nutzen
Der L293D ist ein Dual H-Brücke Motortreiber, der zwei Motoren in beide Richtungen steuern kann. Das Pinout liefert uns die nötigen Informationen zu den Anschlüssen des ICs.
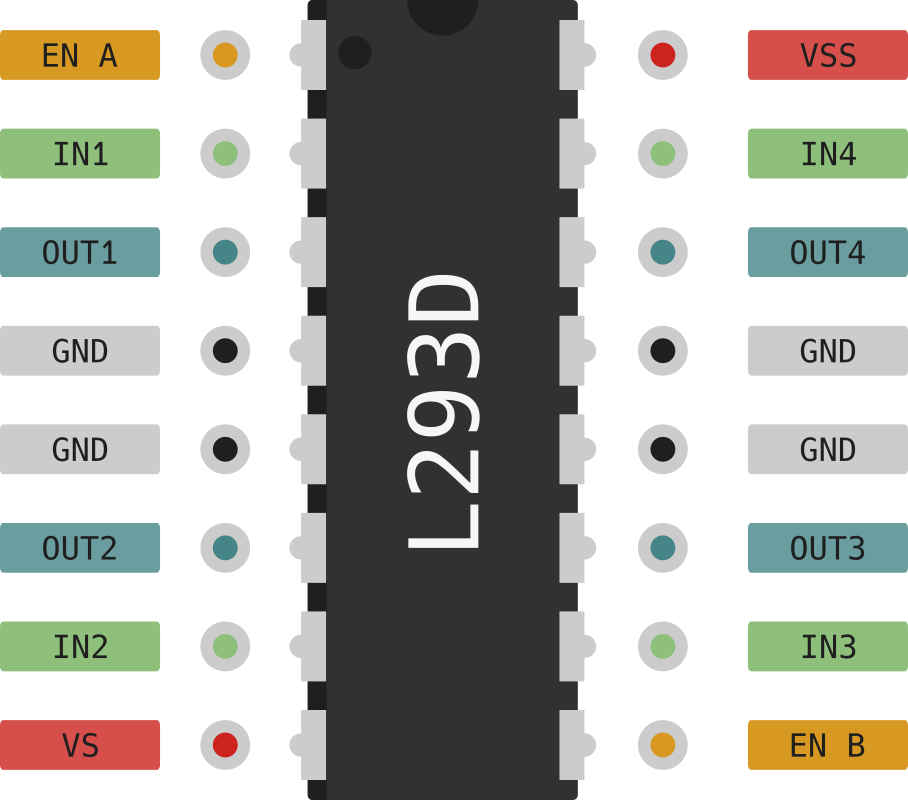
Power Pins:
VSS: Versorgungsspannung für die Logik (5V)VS: Versorgungsspannung für die Motoren (4.5V - 36V)
Richtung festlegen:
Die Richtung des Motors wird durch die Pins IN1 und IN2 festgelegt.
IN1 | IN2 | Motor |
|---|---|---|
| LOW | LOW | Stop |
| HIGH | LOW | Vorwärts |
| LOW | HIGH | Rückwärts |
| HIGH | HIGH | Stop |
Geschwindigkeit festlegen:
Über den Pin EN A kann die Geschwindigkeit des Motors eingestellt werden.
- Ist der Pin
EN ALOW, stoppt der Motor. - Ist der Pin
EN AHIGH, läuft der Motor mit voller Geschwindigkeit. - Für eine Variable Geschwindigkeit kann der Pin
EN Aauch mit einem PWM-Signal angesteuert werden.
Alternative
Alternative
Sie können auch den EN1 Pin dauerhaft auf HIGH setzen und die Geschwindigkeit über die Pins IN1 und IN2 steuern.
Ausgangssignale:
An den beiden Ausgangssignalen OUT1 und OUT2 liegt die Spannung an, die den Motor antreibt.
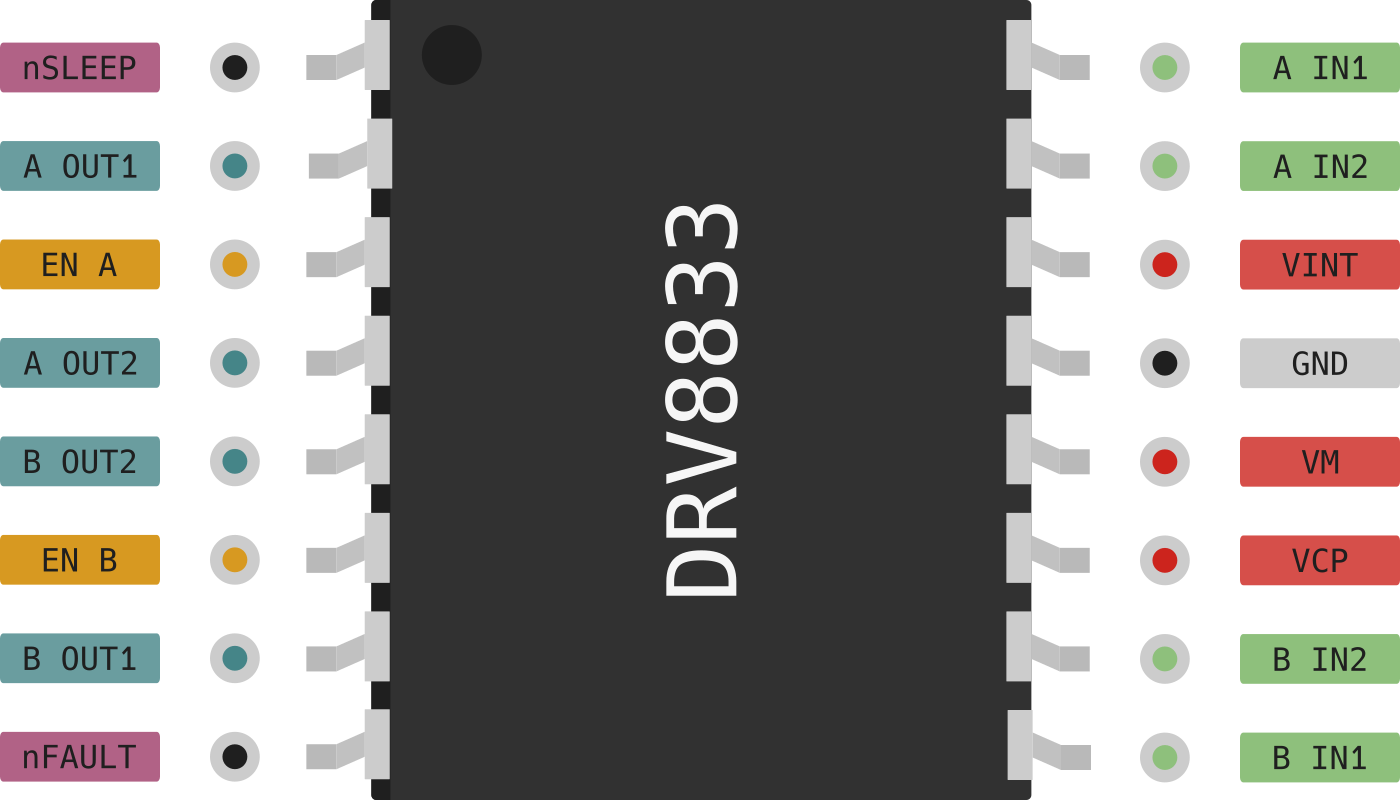
DRV8833 nutzen
Dieser Motortreiber hat ebenfalls zwei H-Brücken integriert. Dies erkennt man auch wieder am Pinout.
Neben dem reinen Chip, welcher nicht als Breadboard kompatibles Design verfügbar ist, gibt es auch Module, auf denen der Chip bereits verbaut ist. Der Anschluss solcher Module ist dann relativ einfach.
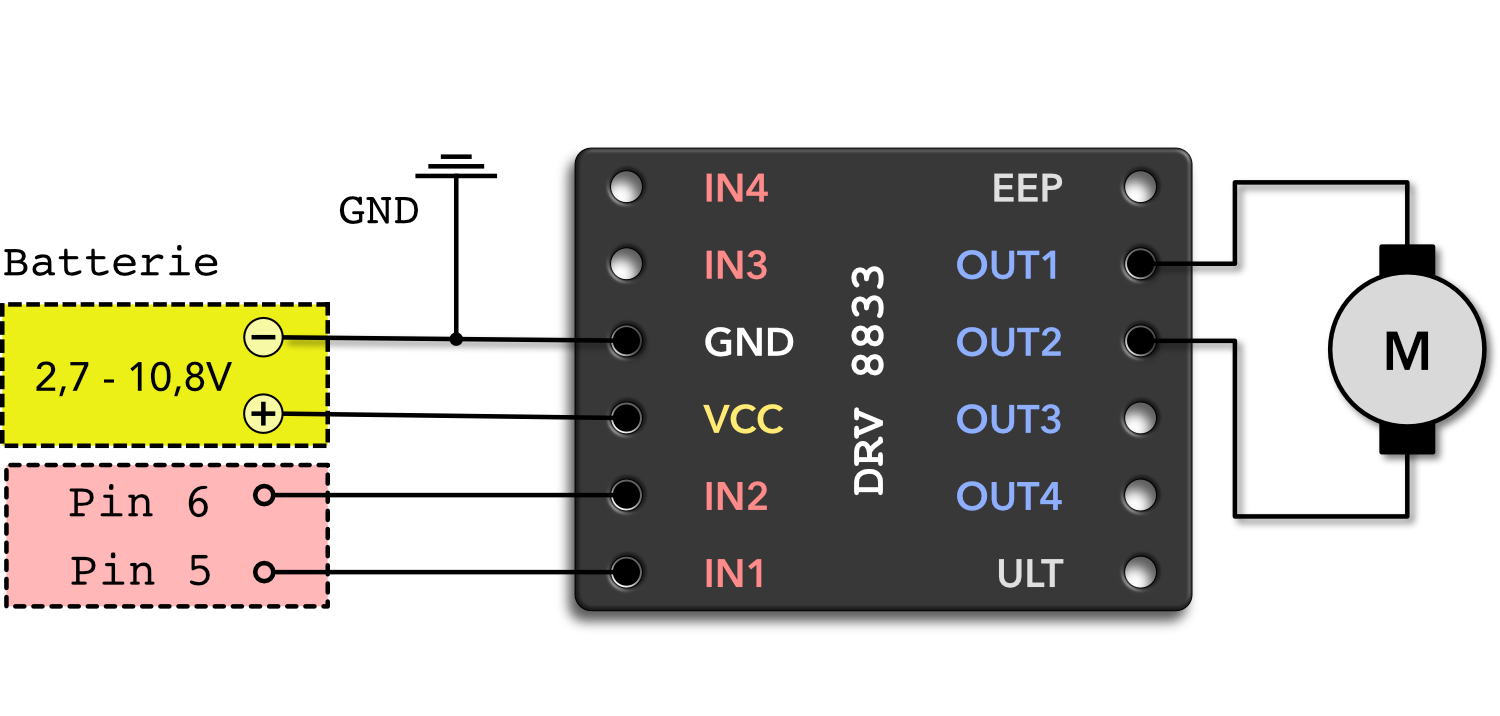
Die Pins 5 und 6 können auch durch andere Pins am ESP32 ersetzt werden.1
Wie sie sehen gibt es hier keinen enable Pin. Sie steuern die Richtung und Geschwindigkeit des Motors über die Pins IN1, IN2 indem Sie ein PWM Signal verwenden.
Bildquelle: rule the bot